


Adhesive grippers ADHESO
The advantages of ADHESO gripper technology are revolutionary:
- Gripping without residue
- Sensitive gripping without mechanical force
- No external energy supply
SCHUNK's application experts take advantage of these benefits and develop customer-specific adhesive grippers with ADHESO gripper technology. Due to the high variability of the adhesive structures, grippers with ADHESO technology can be directly tailored to the requirements of your application.


Adhesive gripping technology
Inspired by nature
The ADHESO gripper technology is based on an adhesive system modeled on nature. The adhesive forces used by animals such as geckos for locomotion are now being utilized by SCHUNK for use in handling applications in the most diverse of fields.
ADHESO material and surface
SCHUNK grippers with ADHESO gripper technology have a distinctive surface architecture made of special polymers. The result is a structure of extremely finely structured legs, which adheres residue-free to the different materials and objects. The scalability options and use of different material characteristics allows the adhesive structure to be adapted to different workpieces and surfaces. This makes grippers with ADHESO technology easy to customize for the most diverse workpieces and applications.


ADHESO gripping process
To pick up the workpiece, gentle pressure is placed on the structure, which increases the contact surface area and applies the effects of the Van der Waals forces. To release the gripper, it can be separated from the workpiece by means of four release mechanisms:
1) Rotary movement
2) Tilting movement
3) Sliding movement
4) Pressing
Alternatively, it is also possible to equip the gripper with an active wiper, which prevents mechanical stress on the workpiece at the placing position.
Grippers with ADHESO technology
Adhesive grippers without energy needs
The gripper solutions that are possible with ADHESO are as diverse as the applications themselves. By varying the material, topography and miniaturization, the gripper can be individually tailored to the different requirements of your application.
SCHUNK offers four standardized ADHESO gripper pad sizes with matching ISO flange adapter, which can already be used to implement a large number of gripper applications quickly and cost-effectively. On request, SCHUNK can also supply a customized ADHESO gripping solution directly tailored to your application.
Benefit from the advantages of ADHESO gripper technology now:
- Low operating costs due to energy-efficient gripping without an additional energy supply
- Gripping without visible residue for sensitive workpieces
- No particle emission, making it suitable for clean room applications
- Versatile in use and ideally adapted to different ranges of applications
The ADHESO adhesive gripper in practice
Impressive characteristics for challenging handling applications
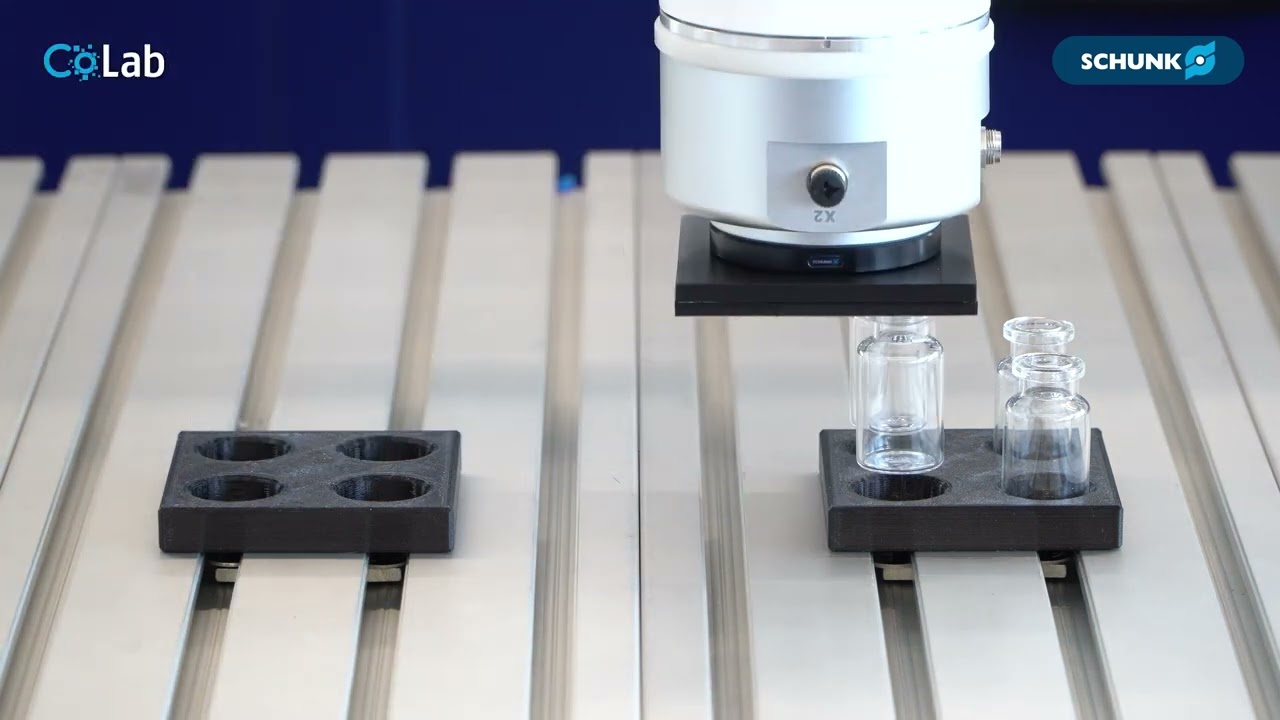
Grippers with ADHESO technology in laboratory automation, medical and pharmaceutical industry
Containers, syringes and other medical objects made of plastic and glass often have very smooth surfaces and are therefore ideally suited for gripping with SCHUNK ADHESO. The particle-free and energy-efficient gripping process allows the ADHESO grippers to be used without any issue even in hygienically sensitive environments. This technology makes it possible to grip in a process reliable way without the need for additional energy and without leaving any residue.
Grippers with ADHESO technology in the electronics industry
Whether for the assembly of printed circuit boards or for gripping complete wafers or circuit boards: SCHUNK ADHESO grippers are ideal for a variety of applications in the electronics industry. Due to the unique ADHESO gripping technology, there are no mechanical pulses acting during the gripping process. That is why SCHUNK ADHESO offers the optimal solution, without causing any residue or particle emission.
