

ADHESO

Pinces adhésives ADHESO
Les avantages de la technologie de préhension ADHESO sont uniques :
- Une préhension sans résidus
- Préhension sensible sans contrainte mécanique
- Aucun apport d'énergie nécessaire
Les experts application SCHUNK profitent de ces avantages et développent des pinces adhésives spécifiques aux clients avec la technologie de préhension ADHESO. En raison de la grande variabilité des structures adhésives, les pinces avec technologie ADHESO peuvent être directement adaptées aux exigences de votre application.


Technologie de préhension adhésive
Inspirée par la nature
La technologie de la pince ADHESO est basé sur un système adhésif inspiré de la nature. Les forces adhésives utilisées par des animaux tels que les geckos pour se déplacer sont maintenant utilisés par SCHUNK pour des applications de manipulation dans les domaines les plus divers.
Matériau et surface ADHESO
Les pinces SCHUNK dotées de la technologie de préhension ADHESO ont une architecture de surface composée de polymères spécifiques. Il en résulte une structure de fils très finement structurées, qui adhère aux différents matériaux et objets sans résidus. Les options de dimensions et l’utilisation de différentes caractéristiques des matériaux permettent d’adapter la structure adhésive à différentes pièces et surfaces. Cela rend les pinces dotées de la technologie ADHESO facile à personnaliser pour les pièces et les applications les plus diverses.


Processus de préhension ADHESO
Pour saisir la pièce, une légère pression est exercée sur la structure, ce qui augmente la surface de contact et applique les effets des forces de Van der Waals. Pour libérer la pince, elle peut être séparée de la pièce à l'aide de quatre mécanismes de libération :
1) Mouvement de rotation
2) Mouvement de basculement
3) Mouvement de glissement
4) Pression
Il est également possible d’équiper la pince d’un système de dépose actif, qui empêche toute contrainte mécanique sur la pièce à la dépose.
Pinces avec technologie ADHESO
Pinces adhésives sans besoin en énergie
Les solutions de préhension réalisables avec la technologie ADHESO sont aussi diverses que les applications elles-mêmes. En faisant varier le matériau, la topographie et la miniaturisation, il est possible d’adapter individuellement la technologie aux différentes exigences de votre application.
SCHUNK propose quatre tailles de pince ADHESO en standard avec l'adaptateur robot ISO correspondant, qui peuvent déjà être utilisées pour mettre en œuvre un grand nombre d'applications de préhension rapidement et à moindre coût. Sur demande, SCHUNK peut également fournir une solution de préhension ADHESO spécifique, directement adaptée à votre application.
Profitez dès maintenant des avantages de la technologie de préhension ADHESO :
- Faibles coûts d’utilisation grâce à une préhension sans besoin d’énergie supplémentaire
- Préhension sans résidus visibles pour les pièces sensibles
- Aucune émission de particules, la pince est donc adaptée aux applications en salle blanche
- Utilisation polyvalente et idéalement adaptée à différent types d’applications
La pince adhésive ADHESO en pratique
Des caractéristiques impressionnantes pour des applications de manipulation difficiles
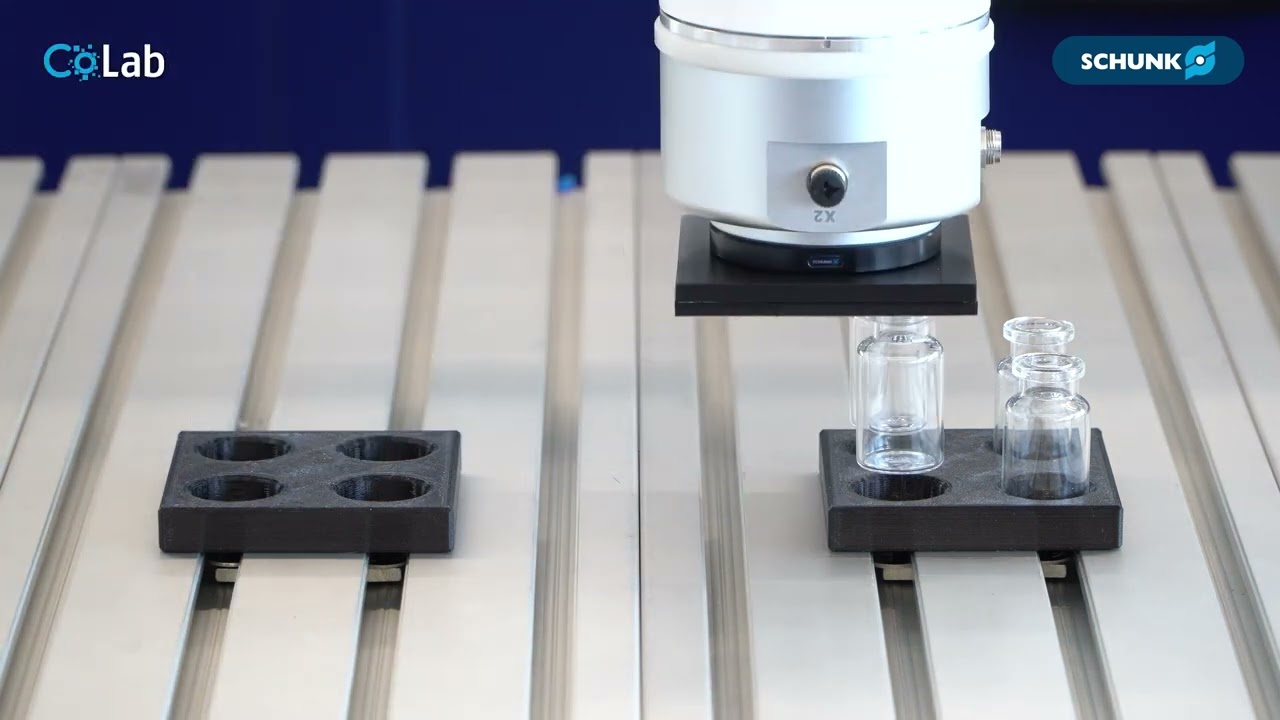
Pinces avec technologie ADHESO dans l'automatisation des laboratoires, l'industrie médicale et pharmaceutique
Les récipients, seringues et autres objets médicaux en plastique et en verre ont souvent des surfaces très lisses et sont donc parfaitement adaptés à la préhension avec SCHUNK ADHESO. Le procédé de préhension sans particules et sans énergie permet d'utiliser les pinces ADHESO sans problème, même dans des environnements sensibles hygiéniquement. Cette technologie permet de saisir de manière fiable en fonction du process, sans besoin d'énergie supplémentaire et sans laisser de résidus.
Pinces avec technologie ADHESO dans l'industrie électronique
Que ce soit pour l'assemblage de circuits imprimés ou pour la préhension de wafer ou de cartes électroniques complètes : les pinces SCHUNK ADHESO sont idéales pour une variété d'applications dans l'industrie électronique. Grâce à la technologie de préhension unique ADHESO, aucune impulsion mécanique n'agit pendant le processus de préhension. C'est pourquoi la technologie SCHUNK ADHESO offre la solution optimale, sans provoquer d'émission de résidus ou de particules.
