


Pinzas adhesivas ADHESO
Las ventajas de la tecnología de agarre ADHESO son revolucionarias:
- Agarre sin residuos
- Agarre sensible sin fuerza mecánica
- Sin suministro de energía externo
Los especialistas en aplicaciones de SCHUNK aprovechan estas ventajas para desarrollar grippers adhesivos específicos para cada cliente con la tecnología de agarre ADHESO. Gracias a la alta variabilidad de las estructuras adhesivas, los grippers con tecnología ADHESO pueden adaptarse directamente a los requisitos de su aplicación.


Tecnología de agarre adhesivo
Inspirado por la naturaleza
La tecnología de agarre ADHESO se basa en un sistema adhesivo basado en la naturaleza. SCHUNK utiliza las fuerzas adhesivas utilizadas por animales como las salamanquesas para la locomoción con el fin de usarlas en aplicaciones de manipulación en los más diversos campos.
Material y superficie ADHESO
Los grippers SCHUNK con tecnología de agarre ADHESO tienen una estructura superficial única hecha de polímeros especiales. El resultado es un conjunto de patas perfectamente estructurado, que se adhiere a los diferentes materiales y objetos sin dejar residuos. Las opciones de escalabilidad y el uso de diferentes características de los materiales permiten adaptar la estructura adhesiva a diferentes piezas y superficies. Esto hace que los grippers con tecnología ADHESO sean fáciles de personalizar para las más diversas piezas de trabajo y aplicaciones.


Proceso de agarre ADHESO
Para recoger la pieza, se ejerce una suave presión sobre la estructura que aumenta el área de la superficie de contacto y aplica los efectos de las fuerzas de Van der Waals. Para liberar la pinza, esta se puede separar de la pieza de trabajo por medio de tres mecanismos de liberación:
1) Movimiento rotatorio
2) Movimiento de inclinación
3) Movimiento deslizante
4) Prensado
Como alternativa, también es posible equipar el gripper con un rascador activo que evita la tensión mecánica de la pieza en la posición de colocación.
Grippers con tecnología ADHESO
Grippers adhesivos sin necesidades energéticas
Las soluciones de agarre posibles con ADHESO son tan diversas como las propias aplicaciones. Al variar el material, la topografía y la miniaturización, el gripper puede adaptarse individualmente a los diferentes requisitos de su aplicación.
SCHUNK ofrece cuatro tamaños estandarizados de almohadillas adherentes ADHESO con el correspondiente adaptador de bridas ISO, que ya pueden utilizarse para implementar un gran número de aplicaciones de agarre de forma rápida y económica. Bajo petición, SCHUNK también puede proporcionar una solución de agarre ADHESO personalizada directamente adaptada a su aplicación.
Benefíciese ya de las ventajas que ofrece la tecnología de agarre ADHESO:
- Bajos costes de funcionamiento gracias a un agarre energéticamente eficiente sin un suministro de energía adicional
- Agarre sin residuos visibles para piezas sensibles
- Sin emisión de partículas, por lo que es adecuado para aplicaciones en salas blancas
- Uso versátil y perfectamente adaptado a diferentes rangos de aplicaciones
La pinza adhesiva ADHESO en la práctica
Características impresionantes para aplicaciones de manipulación complejas
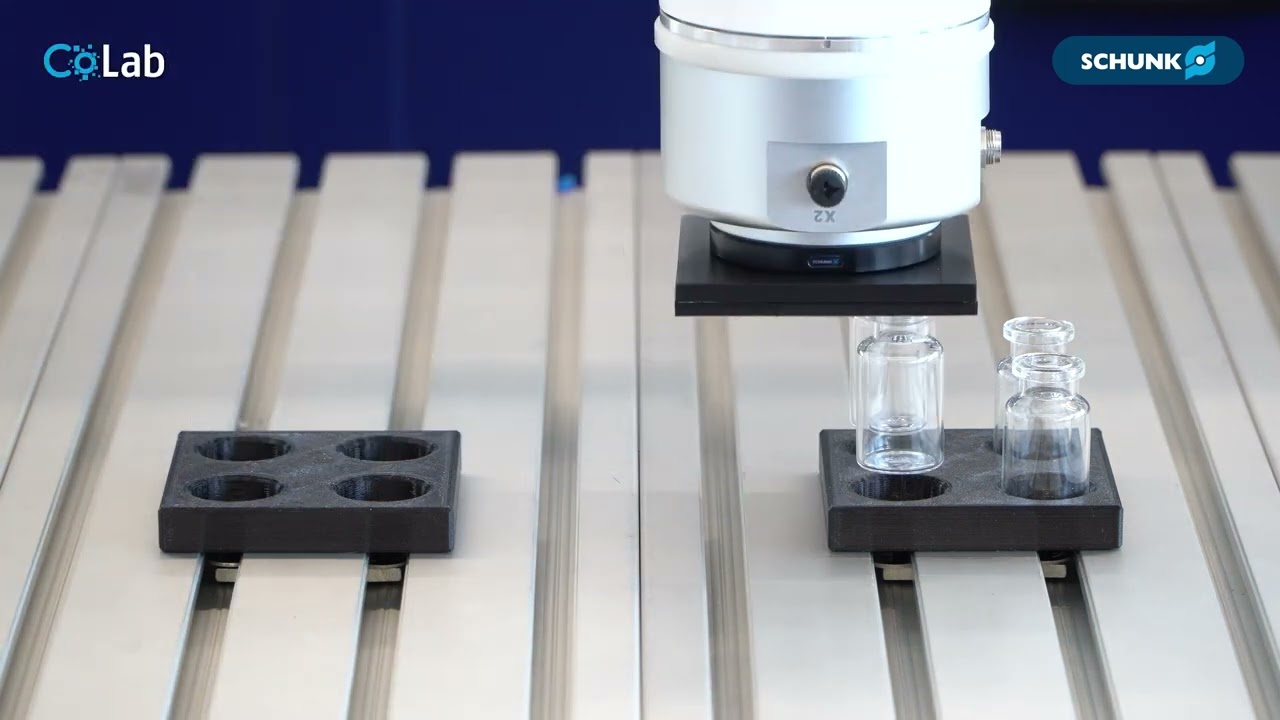
Grippers con tecnología ADHESO en automatización de laboratorios, industria médica y farmacéutica
Los recipientes, las jeringuillas y otros objetos médicos de plástico y vidrio suelen tener superficies muy lisas y, por lo tanto, son ideales para agarrarlas con SCHUNK ADHESO. Con el proceso de agarre sin partículas y de bajo consumo energético, los grippers ADHESO pueden utilizarse sin problemas incluso en entornos higiénicamente sensibles. Esta tecnología permite un agarre fiable respecto al proceso sin necesidad de energía adicional y sin dejar ningún residuo.
Grippers con tecnología ADHESO en la industria electrónica
Ya sea para montar placas de circuitos impresos o para agarrar placas completas, los grippers ADHESO de SCHUNK son ideales para una variedad de aplicaciones en la industria electrónica. Gracias a la exclusiva tecnología de agarre ADHESO, no se dan impulsos mecánicos durante el proceso de agarre. Ello hace que ADHESO de SCHUNK sea la solución óptima, al no producir residuos ni emisión de partículas.
