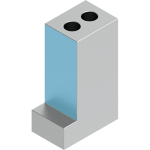
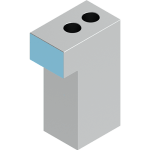
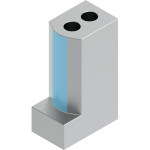
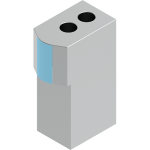
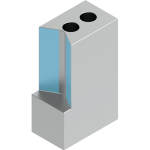
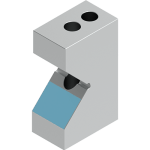
Uchopovací plocha je označena modře
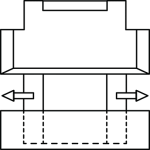
Geometrický model 1 Uchopování za vnější průměr

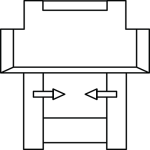
Geometrický model 1 Uchopování za vnitřní průměr

Geometrický model 2 Uchopování za vnější průměr

Geometrický model 2 Uchopování za vnitřní průměr

Geometrický model 3 Uchopování za vnější průměr

Geometrický model 3 Uchopování za vnitřní průměr

Geometrický model 4 Uchopování za vnější průměr

Geometrický model 4 Uchopování za vnitřní průměr

Geometrický model 5 Uchopování za vnější průměr

Geometrický model 5 Uchopování za vnitřní průměr

Geometrický model 6 Uchopování za vnější průměr

Geometrický model 8 Uchopování za vnější průměr