


吸附式机械手 ADHESO
ADHESO 抓取技术的独特优势:
- 抓取无残留物
- 无机械力的灵敏抓取
- 无需外部能源供给
SCHUNK 的应用专家充分利用这些优势,并采用 ADHESO 机械手技术,开发针对特定客户的吸附式机械手。由于分子力吸附结构的高度可变性,可以直接根据您的应用要求,量身定制采用 ADHESO 技术的机械手。


吸附式抓取技术
受自然界启发
ADHESO 机械手技术以自然界中的粘合性系统为基础。SCHUNK 利用壁虎等动物行动时所使用的粘合力,来实现各类领域中的搬运应用。
ADHESO 材料和表面
采用 ADHESO 机械手技术的 SCHUNK 机械手具有独特的表面结构,由特殊聚合物制成。最终形成极其精细的立柱结构,可吸附在不同的材料和物体上,而不产生残留物。可扩展性选项和不同材料特性的应用使得粘合剂结构能够适应不同的工件和表面要求。这使得采用 ADHESO 技术的机械手可以轻松地针对最多样化的工件和应用,予以定制。


ADHESO 抓取过程
为了拾取工件,对结构施加轻柔的压力,从而增加接触表面积,应用范德华力效应。如要放开机械手,则可以通过使用四种释放方式,将其与工件相分离:
1) 旋转运动
2) 倾斜运动
3) 滑动运动
4) 施加压力
此外,如工件在放置时不可受到机械压力,还可选择为机械手配备主动滑动器。
采用 ADHESO 技术的机械手
无需能源的吸附式机械手
采用 ADHESO 技术的机械手解决方案与应用本身一样多样化。通过改变材料、排列和小型化,可根据您应用的不同要求对机械手进行个性化定制。
SCHUNK 提供四种标准化 ADHESO 机械手尺寸,配有 ISO 法兰,可以用于快速、经济高效地实施大量机械手应用。根据要求,SCHUNK 还可以直接针对您的应用量身定制 ADHESO 抓取解决方案。
ADHESO 机械手技术提供的优势:
- 无需额外的能源供应即可实现节能抓取,从而降低运营成本
- 无可见残留物抓取,适用于敏感工件
- 无颗粒排放,适用于洁净室应用
- 是适应不同应用范围的理想选择
吸附式机械手的实际应用
在搬运应用中表现出独特性能
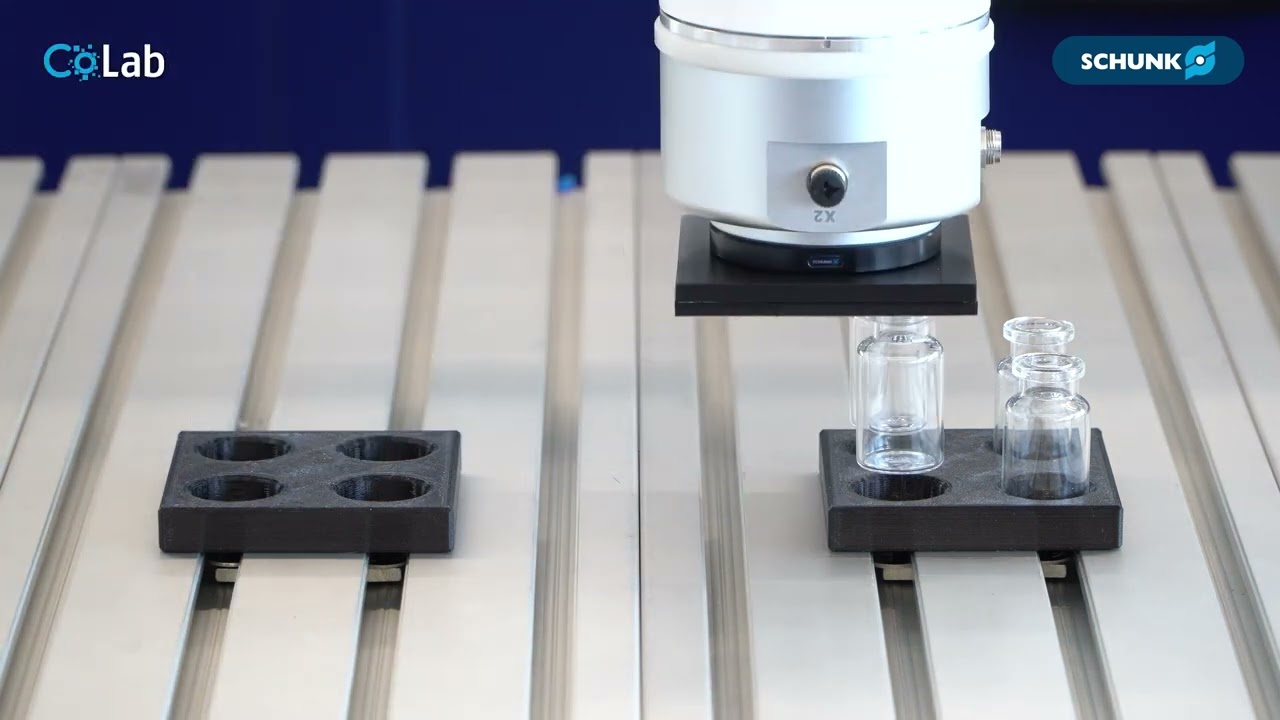
实验室自动化、医疗和制药行业中采用 ADHESO 技术的机械手
容器、注射器和其他由塑料和玻璃制成的医疗物品通常表面非常光滑,因而非常适合用 SCHUNK ADHESO 抓取。由于采用无颗粒和节能的抓取工艺,即便在卫生敏感的环境中,ADHESO 机械手也完全适用。这种抓取技术确保流程可靠,不需要额外的能源,也不会留下任何残留物。
电子行业中采用 ADHESO 技术的机械手
可用于印刷电路板的装配,或夹持整个晶圆或电路板:SCHUNK ADHESO 机械手是电子行业中各类应用的理想选择。由于其独特的 ADHESO 抓取技术,在抓取过程中不会产生机械脉冲作用。同样不会产生任何残留物或颗粒排放,因此 SCHUNK ADHESO 总能提供理想的解决方案。
