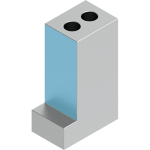
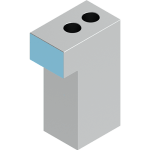
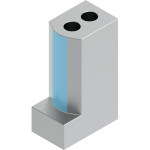
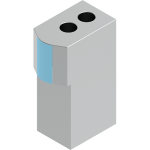
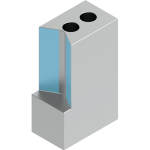
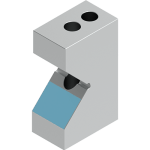
Die Greiffläche ist blau gekennzeichnet
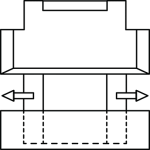
Geometriemodell 1 Außengreifen

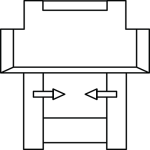
Geometriemodell 1 Innengreifen

Geometriemodell 2 Außengreifen

Geometriemodell 2 Innengreifen

Geometriemodell 3 Außengreifen

Geometriemodell 3 Innengreifen

Geometriemodell 4 Außengreifen

Geometriemodell 4 Innengreifen

Geometriemodell 5 Außengreifen

Geometriemodell 5 Innengreifen

Geometriemodell 6 Außengreifen

Geometriemodell 8 Außengreifen